nordic芯片开发环境配置
nordic环境配置
开发环境配置说明
本项目的开发基于
1 | SDK: nRF Connect SDK v3.2.0 |
使用Zephyr作为操作系统,west为主要管理工具。
Vscode环境安装方式(建议)
安装nrfconnect扩展
扩展安装完成后,需要重启vscode,随后打开扩展进行配置
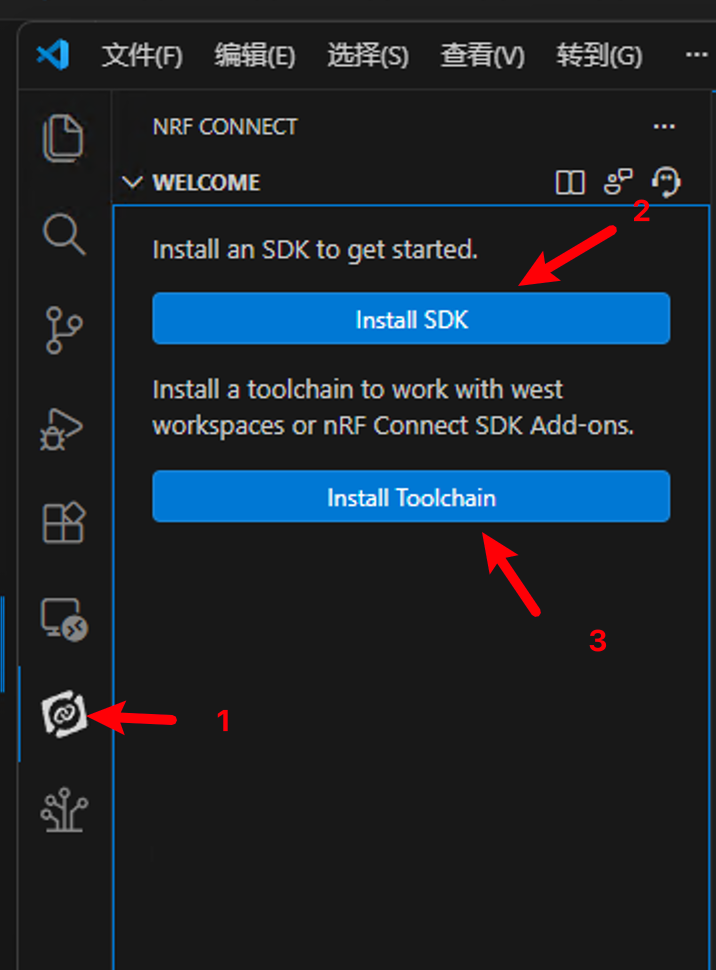
- 安装sdk 选择 中国大陆 选择 nrf Connect SDK 安装全部的sdk(较大)随后选择 3.2.0版本 建议在默认位置进行安装
- 安装toolchain 选择3.2.0版本 【此过程耗时较长 需要30分钟以上】
等待SDK和工具链安装完毕后即可进行如下测试,如通过,则环境安装完成
开发流程
关于编译
对于一个zephyr的工程,首先要理解的是所有的代码和硬件bsp其实是完全解耦合的,只是在编译的过程中,west工具帮助拉取了对应的板子的dts和dtsi文件,获取了板子的CPU flash 引脚 外设等等信息后综合编译出结果。因此,我们在开发的时候首先要明确使用的板子型号是什么,west才可以根据板名进行工程的编译。
首先,我们需要加载带west的环境,请在nrf connect插件当中开启带有工具链环境变量的终端。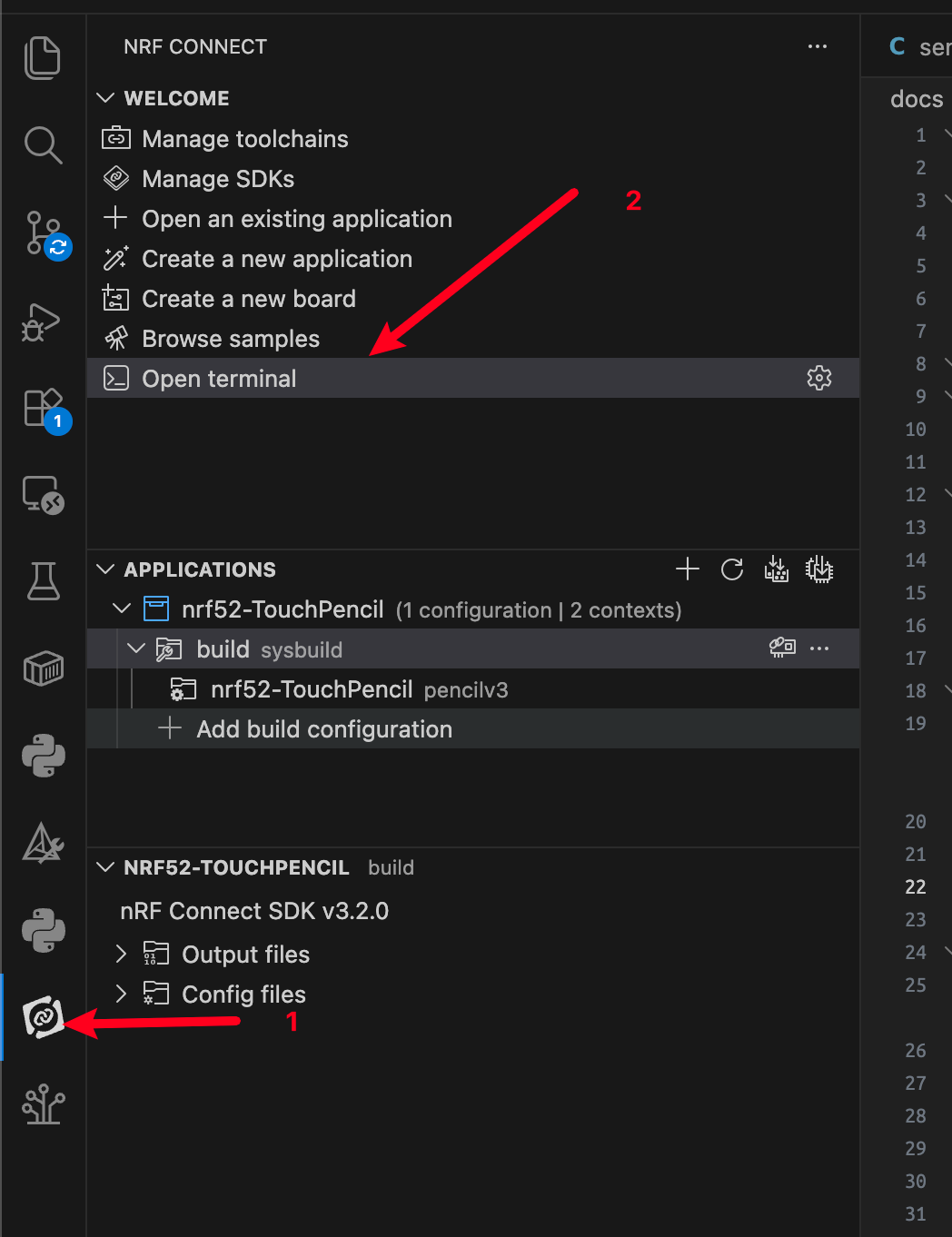
对于已经内置在工具链当中的板子
zephyr社区非常强大,很多已有的开发板已经有了经过考验的官方/社区版dts/dtsi,因此,我们应尽量使用兼容板子减少bug的出现。编译指令示例west build -b xiao_ble/nrf52840/sense,在这个示例中,我们使用的是xiao_ble的52840 sense变体,具体的名称请自行探索(ai/开发板官方应该有很详细的说明了)
对于自己的新板子
我的开发习惯是在本仓库开一个名为boards的文件夹,在内部配置当前工程需要的新板子,并将这个boards目录作为submodule插入主工程的仓库当中方便进行版本管理。
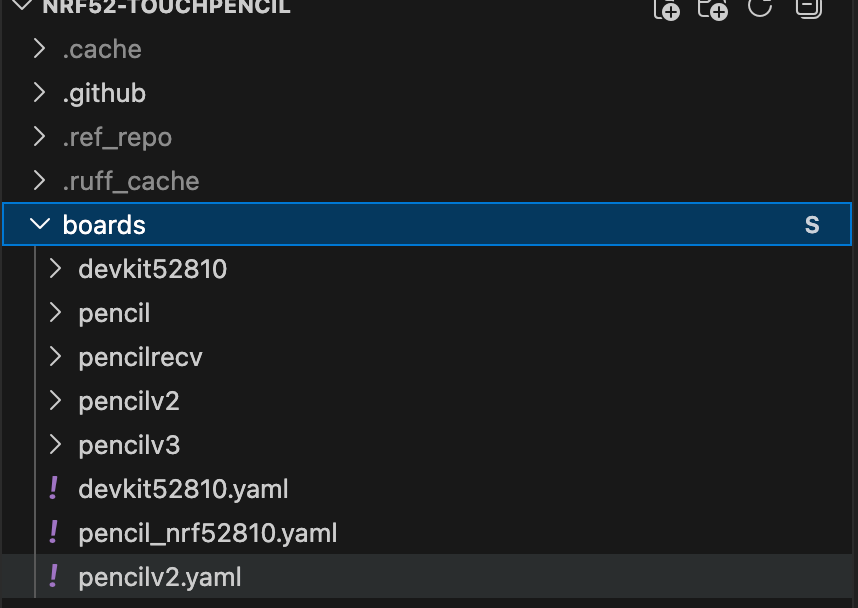
因此,为了让west能找到我们的板子,编译的指令示例为west build -b pencilrecv -- -DBOARD_ROOT=$PWD
关于烧录和调试
入门阶段,我们先只讨论烧录的事情。
uf2
UF2(USB Flashing Format)是一种把固件封装成“可拖拽拷贝到U盘”的升级方式:设备在 UF2 Bootloader 模式下会枚举成一个 USB Mass Storage(看起来像U盘),你把 *.uf2 文件复制进去,Bootloader 会在后台把数据写入 MCU 的 Flash,然后自动重启运行新固件。
编译出来的uf2文件一般在build/nrf52-TouchPencil/zephyr/zephyr.uf2
xiao_nrf52840设备进入uf2的方式是双击rst按钮
jlink
我们自制的板子大多是这样的
J-Link 是 SEGGER 出的硬件调试器/下载器(debug probe),通过 SWD(ARM 常用)或 JTAG 连到 MCU,把电脑上的固件写进芯片 Flash,同时也能做单步调试、断点、读写寄存器/内存、RTT 日志等。
硬件最少要接
- SWDIO、SWCLK、GND、VTref(目标电压参考)
烧录指令是 west flash -r jlink
简单的基于zephyr的工程结构说明
Zephyr 的工程一般分为两块:应用(app) + **板级/硬件描述(board)**。
1) prj.conf:Kconfig 配置入口(“开关”和参数)
路径:./prj.conf
它是 Zephyr 应用最常见的配置文件,用来设置 Kconfig 选项,决定“编译进哪些子系统/驱动/功能”以及它们的参数。
本仓库的 prj.conf 里主要做了这几类事情:
- 日志与控制台:启用
CONFIG_LOG,并把后端切到 RTT(CONFIG_LOG_BACKEND_RTT/CONFIG_USE_SEGGER_RTT),同时关闭 UART console(CONFIG_UART_CONSOLE=n) - 蓝牙:启用 BLE 外设、LLPM 相关配置(例如
CONFIG_BT_CTLR_SDC_LLPM=y) - 传感器与外设:启用
CONFIG_SENSOR、CONFIG_I2C、CONFIG_SPI、CONFIG_ADC、以及 IMU 驱动(例如CONFIG_LSM6DSL=y) - RAM/栈大小:针对 nRF52832 64KB RAM 做了栈大小优化(
CONFIG_MAIN_STACK_SIZE等)
简单理解:**prj.conf 决定“软件能力”**,例如有没有 BLE、有没有 ADC、日志走 RTT 还是 UART。
2) app.overlay:应用级 Devicetree Overlay(“通用硬件连线/节点增改”)
路径:./app.overlay
Devicetree(设备树)描述“板子上有什么硬件、用哪些引脚、设备地址是多少、有哪些别名(chosen/aliases)”等。app.overlay 是对最终设备树的“补丁”,用于:
- 增加/修改节点(例如按钮
gpio-keys、ADC channel、I2C 上的 IMU 节点等) - 启用/禁用外设节点(例如把某些外设
status = "okay"/"disabled") - 增加 pinctrl 片段(例如
&pinctrl下的i2c0_default/spi1_default)
一个典型的 app.overlay 里能看到内容:
/ { switches { compatible = "gpio-keys"; ... } }:定义按键&adc { channel@0 ...; channel@1 ... }:定义 SAADC 两个通道(压力/电池)&i2c0 { ... lsm6ds3tr-c@6a { ... } }:在 I2C0 上挂载 IMU(地址 0x6a)&uicr { nfct-pins-as-gpios; }:把 NFC 引脚释放成 GPIO
它通常用于“跨多个板子共用的硬件描述”或“快速试验连线/外设开关”。
你可以在构建目录的
CMakeCache.txt里看到它被设置到DTC_OVERLAY_FILE(本仓库的 build 产物里记录为.../app.overlay)。
3) board.dts(实际是 <board>.dts):板级 Devicetree 主文件(“这块PCB到底长什么样”)
在 Zephyr 里,板级设备树通常是 boards/<board>/<board>.dts,并不会叫做字面上的 board.dts。
它的特点是:
#include <nordic/nrf52832_qfaa.dtsi>:先引入 SoC 的基础硬件描述(CPU、外设基址等)chosen { ... }:指定 Zephyr 运行时“选用”的设备(console/shell-uart/flash/code-partition 等)aliases { ... }:给应用提供稳定名字(例如led-red/led-green/led-blue),让代码不必写死节点路径- 外设/引脚/分区:例如
&uart0波特率、&i2c0、&flash0 { partitions { ... } }(MCUboot/slot0/slot1 等固定分区)
简单理解:**<board>.dts 是“硬件基线”**,描述这块板子从 SoC 到引脚、外设、分区的完整信息。
4) board.dtsi(实际是各种 *.dtsi):可复用的设备树片段(常见用途:pinctrl)
.dtsi 通常是“被 include 的片段”,用来拆分板级设备树,避免一个 .dts 文件过大,也方便多个板子复用。
这些文件主要在 &pinctrl { ... } 下定义 psels,把外设功能映射到具体引脚(例如 UART0 TX/RX、I2C0 SDA/SCL、SPI1 SCK/MOSI 等),然后在 .dts 里通过:
1 | pinctrl-0 = <&i2c0_default>; |
来选择运行态/低功耗态的引脚配置。
5) (补充)<board>.overlay:板级 Overlay(“只对某个板子做微调”)
有时“同一个应用”要跑在不同板子上,但某些节点需要按板子差异做改动,就会用板级 overlay。